
ノンプリエンプティブマルチタスク(non-preemptive multitasking)は、かつて多くの初期OSに採用されていた協調的マルチタスク(cooperative multitasking)方式であり、今日のITエンジニアにとっても、システム設計やリアルタイム処理を理解する上で重要な概念です。
本記事では、このタスク管理方式の仕組みやメリット・デメリットを専門的な観点から解説し、現在主流のプリエンプティブマルチタスクとの違いも明確にしていきます。
ノンプリエンプティブマルチタスクとは?
ノンプリエンプティブ方式の基本構造
ノンプリエンプティブマルチタスクとは、一つのCPU上で複数のプログラムが協調的にCPUを共有するマルチタスク方式です。
この方式では、OSがCPUの制御権を自動的に奪うことはなく、各プログラムが自発的にOSに制御を返す必要があります。

処理の流れ(例)
-
プログラムAがCPUを使用
-
Aが処理の途中でOSに制御を返す
-
OSがプログラムBにCPUを割り当て
-
Bが一定処理後に制御を返す …(繰り返し)
このように、プログラム間での明示的な制御の返却が前提となるため、「擬似的な」マルチタスク(pseudo multitasking)と呼ばれることもあります。
メリットとデメリット
メリット:シンプルなOS設計と低負荷
-
CPU制御が単純化されるため、OSの構造が簡素になり、メモリ使用量や処理負荷が軽減されます。
-
タスクの切替処理にかかるオーバーヘッドが非常に小さく、リソースが限られた組込みシステムなどで有効です。
デメリット:協調が前提の不安定性
-
プログラムが適切なタイミングで制御を返さない場合、他の処理に遅延や停止が発生します。
-
たとえば、無限ループを含む「不良プログラム」が存在すると、OS全体がフリーズする恐れもあります。
-
OSが各プロセスの状態を監視・強制できないため、システム全体の安定性に課題があります。
ノンプリエンプティブマルチタスクの実装事例と適用領域
歴史的な事例:Windows 3.1
Windows 3.1やMac OS 9以前のMacintoshなど、1990年代初期のデスクトップOSはこの方式を採用していました。
これは当時のハードウェア性能やOS設計思想に基づく合理的な選択でした。
現代における適用:リアルタイム組込みシステム
現在では、リアルタイムOS(RTOS)やマイコン(MCU)を使った制御システムなど、予測可能なタスク実行が求められる場面で、あえてノンプリエンプティブ方式が使われることがあります。
例:IoTセンサー制御、簡易な信号処理装置
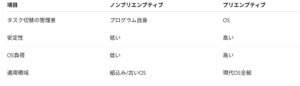
プリエンプティブマルチタスクとの違い
プリエンプティブ方式の特徴
現代の主流であるプリエンプティブマルチタスク(preemptive multitasking)では、OSが一定のタイムスライスごとにタスクを強制的に切替えます。
これにより、安定性と公平性が確保されます。
まとめ
ノンプリエンプティブマルチタスクは、協調的にCPUを共有するマルチタスク手法であり、OSの設計をシンプルに保てるというメリットを持ちながらも、プログラム間の信頼と協調が必要なため、現代ではあまり使われなくなっています。
ただし、リアルタイム組込み分野など、明確に管理されたタスク環境では今も有効な選択肢です。
本記事を通じて、non-preemptive multitaskingの基本概念から、歴史的な利用例、プリエンプティブ方式との違いまでを理解していただけたかと思います。
システム設計やOSアーキテクチャを深く学びたい方にとって、本知識は今後の開発に大きく役立つはずです。